This VI runs in parallel to other tasks. It can contain as many user-defined periodic loops as you need. These can carry out PID or other sorts of timed response.

|
|
error in error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
RobotConfig |
|
|
Motors |
|
|
RightDrivePrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
RightDriveSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
LeftDrivePrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
LeftDriveSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
RightShooter |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
LeftShooter |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
ShooterRotate |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
ShooterHood |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
HopperWheel |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Elevator |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
ClimberLeft |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
ClimberRight |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Intake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
ControlPanel |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuous Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
PID |
|
|
Shooter |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Turret |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ControlPanel |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Hood |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
MotionMagic |
|
|
Turret |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
Elevator |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
ControlPanel |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
ElevatorBottom |
|
|
ID |
|
|
RangingMode |
|
|
sampleTime(ms) |
|
|
ElevatorTop |
|
|
ID |
|
|
RangingMode |
|
|
sampleTime(ms) |
|
|
ControlPanelColorSensor |
|
|
alsIntegrationTime(ms) |
|
|
alsGain |
|
|
I2C Bus |
|
|
numProximityPulses |
|
|
proximityGain |
|
|
proximityLEDCurrent(mA) |
|
|
proximityPulseLength(ms) |
|
|
proximitySampleTime(ms) |
|
|
Solenoids |
|
|
Intake |
|
|
Solenoid Channel |
|
|
Invert |
|
|
ClimberRachet |
|
|
Solenoid Channel |
|
|
Invert |
|
|
EnableCompressor |
|
|
RobotDimensions |
|
|
Wheelbase(in) |
|
|
Length(in) |
|
|
CameraMounting |
|
|
LensHeight(in) |
|
|
RotationRadius(in) |
|
|
Pitch(deg) |
|
|
Yaw(deg) |
|
|
SensorCalibrations |
|
|
TopToFMinBallDistance(in) |
|
|
BottomToFMinBallDistance(in) |
|
|
Homing |
|
|
Hood Homing Position (deg) |
|
|
Turret Homing Position (deg) |
|
|
MotionLimits |
|
|
Hood |
|
|
Min (deg) |
|
|
Max (deg) |
|
|
Turret |
|
|
Min (deg) |
|
|
Max (deg) |
|
|
Argo Drive Joystick Map |
|
|
Auto Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Low Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Auto Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Low Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
HoodHomeReset |
|
|
HoodHomeActivate |
|
|
Turret Homing Activated |
|
|
TurretHomeReset |
|
|
SetPointHood(Deg) |
|
|
Activate Auto (Shooter Hood) |
|
|
Activate Auto (Turret) |
|
|
SetPointTurret(Deg) |
|
|
DisableLimelight |
|
|
ShooterSpeed(rpm) |
|
|
ManualShooterSpeed |
|
|
Climb Speed |
|
|
ShooterRPMLowPassFilterPercent |
|
|
RestingRPM |
|
|
TargetAcquiredDebounceTime(ms) |
|
|
ManualColorWheelSpeed |
|
|
ManualDrivePID |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ManualDrivePIDEnable |
|
|
Hood_Homing_State |
|
|
Turret Homing_State |
|
|
HoodManual? |
|
|
Hood Current Position (Deg) |
|
|
Turret Current Position (Deg) |
|
|
TurretManual |
|
|
Target Found? |
|
|
Shooter Velocity |
|
|
Turret Distance (in) |
|
|
BottomToFDistance(in) |
|
|
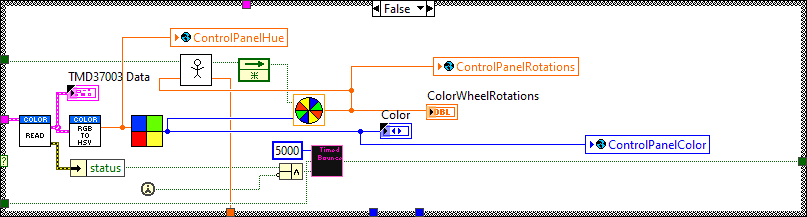
ColorWheelRotations |
|
|
TMD37003 Data |
|
|
Valid |
|
|
Color |
|
|
alsSaturated |
|
|
proximitySaturated |
|
|
Proximity |
|
|
AmbientLightLevel |
|
|
Color |

"Periodic Tasks.vi History"
Current Revision: 190
















